are you speaking of using the preinstalled cmd for finding ports? such as receive
#include <HardwareSerial.h>
HardwareSerial SerialTFMini( 1 );
HardwareSerial SerialBrain( 2 );
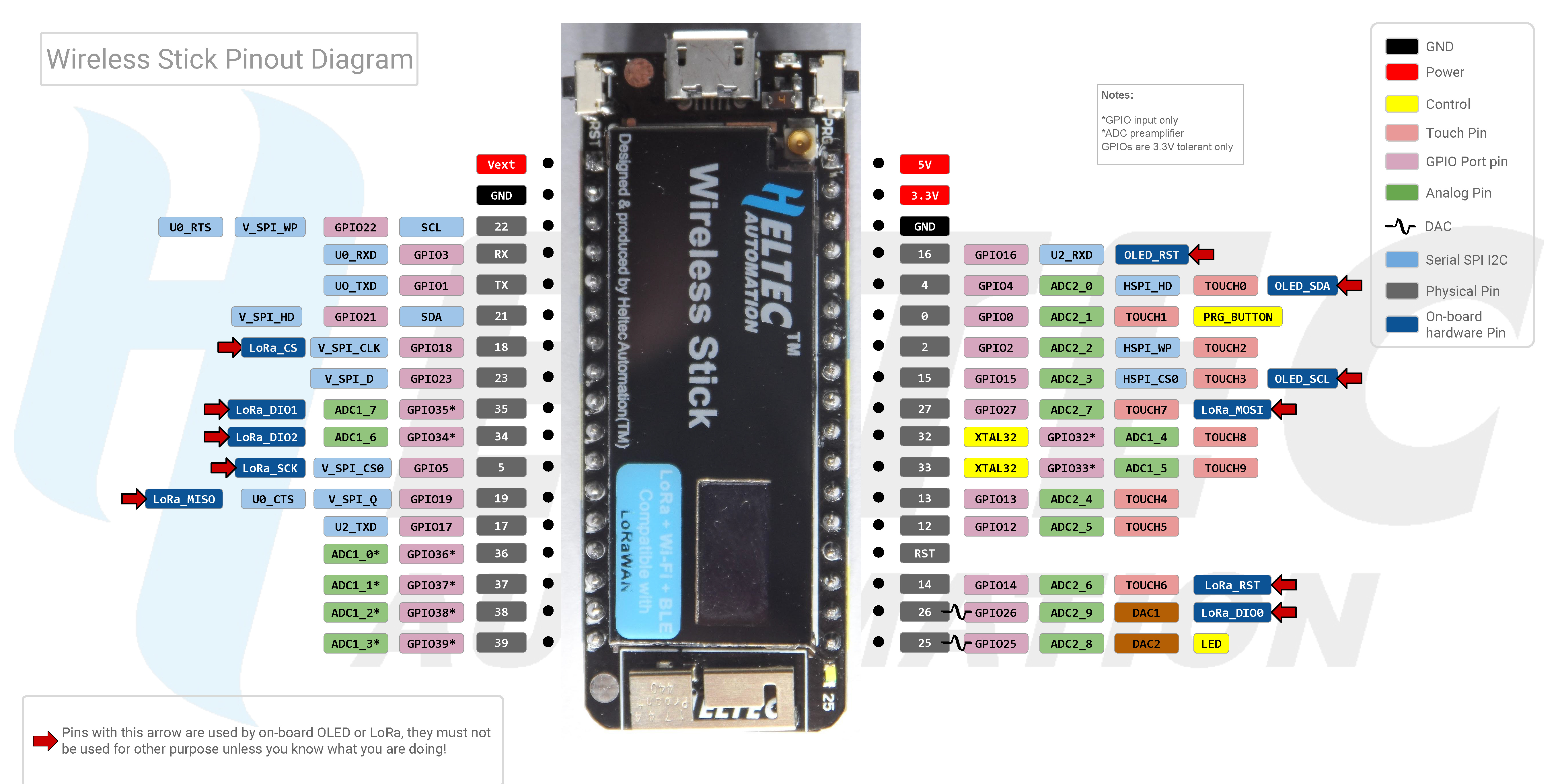
////// serial(1) = pin27=RX green, pin26=TX white
////// serial(2) = pin16=RXgreen , pin17=TX white
#define SerialDataBits 115200
void setup()
{
SerialBrain.begin( SerialDataBits );
SerialTFMini.begin( SerialDataBits, SERIAL_8N1, 27, 26 );
}
void fSendLIDAR_InfoSerialToBrain( void *pvParameters )
{
struct stu_LIDAR_INFO pxLIDAR_INFO;
for ( ;; )
{
xEventGroupWaitBits (eg, evtGetIMU, pdTRUE, pdTRUE, portMAX_DELAY);
xSemaphoreTake( sema_LIDAR_FOR_ALARM, xSemaphoreTicksToWait );
xQueueReceive ( xQ_LIDAR_FOR_ALARM, &pxLIDAR_INFO, QueueReceiveDelayTime );
xSemaphoreGive( sema_LIDAR_FOR_ALARM );
int CellCount = 1 ;
// send LIDAR info for alarm
String sSerial = “”;
sSerial.reserve ( 300 );
sSerial.concat( “<#,” ); //sentence begin
sSerial.concat( String(ScanPoints) + “,” );
sSerial.concat( String(pxLIDAR_INFO.ServoSweepUp) + “,” ); // get direction of scan
for ( CellCount; CellCount <= ScanPoints; CellCount++ )
{
sSerial.concat( String(pxLIDAR_INFO.Range[CellCount]) + “,” );
}
sSerial.concat( “>” ); //sentence end
vTaskDelay( 10 );
SerialBrain.println ( sSerial );
}
vTaskDelete( NULL );
} // void fSendLIDAAR_InfoSerialToBrain( void *pvParameters )