
Hi,
I am using LoRa32 as a node to communicate with Raspberry Pi. For now I am able to run the code on both ends but I am not receiving or sending any data to the devices. I am looking for some advice thanks in advance!
Heltec LoRa32 code:
// This program sends a response whenever it receives the “INF” mens
// This file is part of rpsreal/LoRa_Ra-02_Arduino
// Based on example Arduino9x_RX RADIOHEAD library
// It is designed to work with LORA_SERVER
#include <SPI.h>
#include <RH_RF95.h>
#define RFM95_CS 18
#define RFM95_RST 14
#define RFM95_INT 26
// Change to 434.0 or other frequency, must match RX’s freq!
#define RF95_FREQ 915.0
// Singleton instance of the radio driver
RH_RF95 rf95(RFM95_CS, RFM95_INT);
// Blinky on receipt
#define LED 13
void setup()
{
pinMode(LED, OUTPUT);
pinMode(RFM95_RST, OUTPUT);
digitalWrite(RFM95_RST, HIGH);
while (!Serial);
Serial.begin(9600);
delay(100);
// manual reset
digitalWrite(RFM95_RST, LOW);
delay(10);
digitalWrite(RFM95_RST, HIGH);
delay(10);
while (!rf95.init()) {
Serial.println(“LoRa radio init failed”);
while (1);
}
// Defaults after init are 434.0MHz, modulation GFSK_Rb250Fd250, +13dbM
if (!rf95.setFrequency(RF95_FREQ)) {
Serial.println(“setFrequency failed”);
while (1);
}
// The default transmitter power is 13dBm, using PA_BOOST.
// If you are using RFM95/96/97/98 modules which uses the PA_BOOST transmitter pin, then
// you can set transmitter powers from 5 to 23 dBm:
// Bw = 125 kHz, Cr = 4/8, Sf = 4096chips/symbol, CRC on.
// Slow+long range.
//rf95.setModemConfig(RH_RF95::Bw125Cr48Sf4096);
// Defaults after init are 434.0MHz, Bw = 125 kHz, Cr = 4/5, Sf = 128chips/symbol, CRC on
// Medium Range
rf95.setTxPower(18);
Serial.println(“START”);
}
uint8_t buf[RH_RF95_MAX_MESSAGE_LEN];
uint8_t len = sizeof(buf);
void loop()
{
if (rf95.available()){
if (rf95.recv(buf, &len)){
digitalWrite(LED, HIGH);
//RH_RF95::printBuffer("Got: ", buf, len);
Serial.print("Received: ");
Serial.println((char*)buf);
Serial.print("RSSI: ");
Serial.println(rf95.lastRssi(), DEC);
if (strcmp("INF",((char*)buf)) == 0){
Serial.println("Received data request INF");
delay(2000);
Serial.println("Send mens: DATA ARDUINO");
uint8_t data[] = "DATA ARDUINO";
rf95.send(data, 13); //sizeof(data)
rf95.waitPacketSent();
}
digitalWrite(LED, LOW);
}
else
{
Serial.println("Receive failed");
}
}
}
Here is the Raspberry Pi Server Code:
import time
from SX127x.LoRa import *
#from SX127x.LoRaArgumentParser import LoRaArgumentParser
from SX127x.board_config import BOARD
BOARD.setup()
BOARD.reset()
#parser = LoRaArgumentParser(“Lora tester”)
class mylora(LoRa):
def init(self, verbose=False):
super(mylora, self).init(verbose)
self.set_mode(MODE.SLEEP)
self.set_dio_mapping([0] * 6)
self.var=0
def on_rx_done(self):
BOARD.led_on()
#print("\nRxDone")
self.clear_irq_flags(RxDone=1)
payload = self.read_payload(nocheck=True)
print ("Receive: ")
print(bytes(payload).decode("utf-8",'ignore')) # Receive DATA
BOARD.led_off()
time.sleep(2) # Wait for the client be ready
print ("Send: ACK")
self.write_payload([255, 255, 0, 0, 65, 67, 75, 0]) # Send ACK
self.set_mode(MODE.TX)
self.var=1
def on_tx_done(self):
print("\nTxDone")
print(self.get_irq_flags())
def on_cad_done(self):
print("\non_CadDone")
print(self.get_irq_flags())
def on_rx_timeout(self):
print("\non_RxTimeout")
print(self.get_irq_flags())
def on_valid_header(self):
print("\non_ValidHeader")
print(self.get_irq_flags())
def on_payload_crc_error(self):
print("\non_PayloadCrcError")
print(self.get_irq_flags())
def on_fhss_change_channel(self):
print("\non_FhssChangeChannel")
print(self.get_irq_flags())
def start(self):
while True:
while (self.var==0):
print ("Send: INF")
self.write_payload([255, 255, 0, 0, 73, 78, 70, 0]) # Send INF
self.set_mode(MODE.TX)
time.sleep(3) # there must be a better solution but sleep() works
self.reset_ptr_rx()
self.set_mode(MODE.RXCONT) # Receiver mode
start_time = time.time()
while (time.time() - start_time < 10): # wait until receive data or 10s
pass;
self.var=0
self.reset_ptr_rx()
self.set_mode(MODE.RXCONT) # Receiver mode
time.sleep(10)
lora = mylora(verbose=True)
#args = parser.parse_args(lora) # configs in LoRaArgumentParser.py
Slow+long range Bw = 125 kHz, Cr = 4/8, Sf = 4096chips/symbol, CRC on. 13 dBm
lora.set_freq(915.0)
lora.set_pa_config(pa_select=1, max_power=21, output_power=15)
lora.set_bw(BW.BW125)
lora.set_coding_rate(CODING_RATE.CR4_8)
lora.set_spreading_factor(12)
lora.set_rx_crc(True)
#lora.set_lna_gain(GAIN.G1)
#lora.set_implicit_header_mode(False)
lora.set_low_data_rate_optim(True)
Medium Range Defaults after init are 434.0MHz, Bw = 125 kHz, Cr = 4/5, Sf = 128chips/symbol, CRC on 13 dBm
#lora.set_pa_config(pa_select=1)
assert(lora.get_agc_auto_on() == 1)
try:
print(“START”)
lora.start()
except KeyboardInterrupt:
sys.stdout.flush()
print(“Exit”)
sys.stderr.write(“KeyboardInterrupt\n”)
finally:
sys.stdout.flush()
print(“Exit”)
lora.set_mode(MODE.SLEEP)
BOARD.teardown()
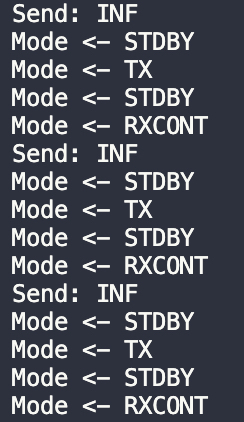
rpi:
thank you in advance!